Curiosity (rover)
| Curiosity | |||||
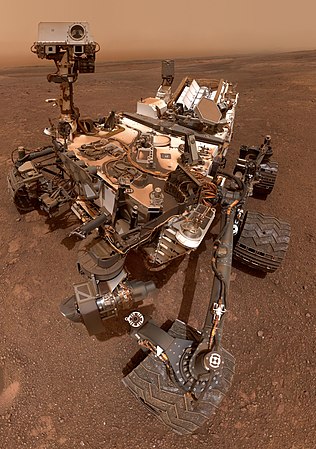
 Autoportret Curiosity la poalele Muntelui Sharp, 6 octombrie 2015 | |||||
| Statisticile misiunii37936 | |||||
|---|---|---|---|---|---|
| Program | Mars Science Laboratory | ||||
| Operator | NASA | ||||
| Indicativ | 2011-070A | ||||
| Propulsor | Atlas V 541[*][1][2] | ||||
| Locul lansării | Cape Canaveral LC-41[3] | ||||
| Data lansării | 26 noiembrie 2011, 15:02:00 UTC[4][5][6] | ||||
| Loc aterizare | 6 august 2012, 05:17:57 UTC[7][8] | ||||
| Aterizare | 6 august 2012, 05:17:57 UTC[7][8] | ||||
| Durata misiunii | Inițial: 668 soli (687 zile)[9] Actual: 4399 soli (4520 zile) de la aterizare[9] | ||||
| Distanța parcursă | 24,24 km [10] la data de [update] | ||||
| Instrumente | Mastcam[*][11] MAHLI[*][12] MARDI[*][13] alpha particle X-ray spectrometer[*][14] ChemCam[*][15] CheMin[*][16] Sample Analysis at Mars[*][17] RAD[*][18] DAN[*][19] REMS[*][20] | ||||
| Alte misiuni | |||||
| |||||
| Modifică date / text | |||||
Curiosity este un rover proiectat pentru a explora craterul Gale de pe Marte, ca parte a misiunii NASA Mars Science Laboratory (MSL).[4] Curiosity a fost lansat de la Cape Canaveral la 26 noiembrie 2011, ora 15:02 UTC și a aterizat pe Aeolis Palus în interiorul Gale la 6 august 2012, ora 05:17 UTC.[7][8][21] Obiectivele roverului au inclus o investigație a climatului și a geologiei marțiene; cercetarea dacă situl a oferit vreodată condiții de mediu favorabile vieții microbiene, inclusiv investigarea rolului apei; și studii privind habitatele planetare în pregătirea explorării umane a planetei.[22][23]
În decembrie 2012, misiunea de doi ani a lui Curiosity a fost extinsă indefinit,[24] iar la 5 august 2017, NASA a sărbătorit cea de-a cincea aniversare a aterizării roverului.[25][26] Curiosity este încă operațional, iar la 21 decembrie 2024, Curiosity era pe Marte de 4399 soli, de la aterizarea din 6 august 2012. Designul roverului servește drept bază pentru roverul Perseverance, care va purta diferite instrumente științifice.
Obiective
modificarePrincipalele obiective științifice ale misiunii MSL sunt de a ajuta să se determine dacă Marte ar fi putut să susțină vreodată viața, precum și să determine rolul apei și să studieze climatul și geologia planetei Marte.[22][23] Rezultatele misiunii vor ajuta de asemenea la pregătirea pentru explorarea umană a planetei.[23] Pentru a contribui la aceste obiective, MSL are opt obiective științifice principale:[27]
- Evaluarea proceselor biologice
- Să determine natura și clasificarea compușilor organici de carbon
- Să facă un inventar al principalelor componente care permit viața: carbon, hidrogen, azot, oxigen, fosfor și sulf
- Să identifice caracteristicile care pot reprezenta efectele proceselor biologice (biosemnături și biomolecule)
- Obiective geologice și geochimice
- Să investigheze compoziția chimică, izotopică și minerală a suprafeței marțiene.
- Să interpreteze procesul de formare și erodare a rocilor și a solului.
- Evaluarea proceselor planetare
- Evaluarea proceselor evolutive ale atmosferei marțiene pe termen lung (4 miliarde de ani).
- Determinarea stării actuale, ciclurile și distribuția apei și a dioxidului de carbon.
- Evaluarea radiației de suprafață
- Caracterizarea spectrul larg de radiații de la suprafață, inclusiv radiația cosmică, evenimentele cu particule solare și neutronii secundari. Obiectivul include măsurarea și expunerea la radiații în interiorul navei spațiale în timpul călătoriei spre Marte. Aceste date sunt importante pentru o viitoare misiune cu echipaj uman.[28].
După aproximativ un an de misiune la suprafață și după ce s-a apreciat că vechiul Marte ar fi putut fi ospitalier pentru viața microbiană, obiectivele misiunii MSL au evoluat în dezvoltarea de modele predictive pentru procesul de conservare a compușilor organici și a biomoleculelor.[29]
Specificații tehnice
modificareCuriosity a reprezentat 23% din masa navei spațiale de 3.893 kg la lansare. Masa rămasă a fost eliminată în procesul de transport și de aterizare.
- Dimensiuni: Roverul are o masă de 899 kg, dintre care instrumentele științifice cântăresc 80 de kg.[30] Are o lungime de 2,9 metri, lățime de 2,7 metri și înălțime de 2,2 metri.[31]
- Sursa de alimentare: Curiosity este alimentat de un generator termoelectric radio-izotopic (RTG), la fel ca Viking 1 și Viking 2 care au aterizat pe Marte cu succes în 1976.[32][33]
- Sistemele energetice radioizotopice (RPS) sunt generatoare care produc energie electrică din decăderea radioizotopilor, cum ar fi plutoniu-238, care este un izotop ne-fisil de plutoniu. Căldura dată de decăderea acestui izotop este transformată în tensiune electrică prin termocupluri, asigurând o putere constantă în toate anotimpurile și pe timp de zi și noapte. Pierderile de căldură sunt de asemenea utilizate pentru a încălzi sistemele, eliberând energia electrică pentru funcționarea vehiculului și instrumentelor.[32][33]
- RTG-ul Curiosity este un MMRTG (Multi-Mission radiometrice termoelectric Generator), proiectat și construit de "Rocketdyne" și "Teledyne Energy Systems" [34][35] și asamblat și testat de laboratorul național Idaho.[36] Sursa de alimentare generează 9 MJ (2,5 kWh) de energie electrică în fiecare zi, mult mai mult decât panourile solare ale lui Mars Exploration Rover, care generau aproximativ 2,1 MJ (0,58 kWh) zilnic. Ieșirea electrică de la MMRTG încarcă doi acumulatori litiu-ion. Acest lucru permite subsistemului de putere să satisfacă cerințele de vârf de putere ale activităților roverului atunci când cererea depășește temporar nivelul de ieșire constant al generatorului. Fiecare baterie are o capacitate de aproximativ 42 amperi-oră.
- Sistemul de respingere a căldurii: Temperaturile la locul de aterizare pot varia de la -127°C la 40°C, prin urmare, sistemul termic încălzește roverul pentru cea mai mare parte a anului marțian. Sistemul termic face acest lucru în mai multe moduri: pasiv, prin disiparea la componentele interne, prin încălzitoare electrice amplasate strategic pe componentele cheie și prin utilizarea sistemului roverului de respingere a căldurii (HRS).[37] Utilizează lichid pompat prin tubul de 60 m din corpul roverului, astfel încât componentele sensibile să fie păstrate la temperaturi optime.[38]
- Calculatoare: Cele două calculatoare identice ale roverului, numite Rover Computer Element (RCE) conțin memorie rezistentă la radiații pentru a tolera radiațiile extreme din spațiu și pentru a proteja împotriva ciclurilor de întrerupere. Calculatoarele rulează pe VxWorks, un sistem de operare în timp real (RTOS). Fiecare memorie a calculatorului include 256 kB de EEPROM, 256 MB de DRAM și 2 GB de memorie flash.[39] Pentru comparație, Mars Exploration Rovers a folosit 3 MB de EEPROM, 128 MB de DRAM și 256 MB de memorie flash.[40]

- Comunicații: Curiosity este echipat cu un sistem de comunicații pe bază de redundanță care are un transmițător și receptor de bandă X care pot comunica direct cu Pământul și Electra-Lite construit pe baza tehnologiei echipamentelor radio definite prin software pentru comunicarea cu sondele spațiale care orbitează Marte.[37] Comunicarea cu sondele este calea principală pentru revenirea datelor pe Pământ, deoarece ele au mai multă putere și antene mai mari decât dispozitivul de aterizare, permițând viteze mai rapide de transmisie.[37] Semnalele dintre Pământ și Marte durează în medie 14 minute și 6 secunde.[41] Curiosity poate comunica cu Pământul direct la viteze de până la 32 kbit/s, însă cea mai mare parte a transferului de date este transmisă prin Mars Reconnaissance Orbiter și 2001 Mars Odyssey. Viteza de transfer a datelor între Curiosity și fiecare sondă spațială poate atinge 2000 kbit/s și respectiv 256 kbit/s, dar fiecare sondă poate comunica cu Curiosity doar pentru opt minute pe zi.[42] Comunicarea de la și la Curiosity se bazează pe protocoalele de comunicații de date spațiale convenite la nivel internațional, așa cum au fost definite de Comitetul consultativ pentru sistemele de date spațiale.[43]
- Sisteme de mobilitate: Curiosity este echipat cu șase roți cu diametrul de 50 cm cu suspensie rocker-bogie. Sistemul de suspensie a servit și ca echipament de aterizare pentru vehicul, spre deosebire de predecesorii săi.[44][45] Fiecare roată este acționată și adaptată independent, permițând roverului să traverseze mai multe tipuri de teren. Pe fiecare roată este imprimată în relief codul Morse pentru JPL (Jet Propulsion Laboratory) (· --- · · · · ···).[46] Pe măsură ce roverul înaintează, amprenta rămâne pe solul marțian. Curiosity este capabil să urce pe dune de nisip cu pante până la 12,5°.[47] În funcție de centrul de greutate, vehiculul poate rezista la o înclinare de cel puțin 50° în orice direcție fără să se răstoarne, dar senzorii automați limitează roverul la o înclinare de 30°.[37] După șapte ani de utilizare, roțile sunt uzate vizibil.[48]
- Curiosity se poate rostogoli peste obstacole care se apropie de înălțimea de 65 cm,[49] și are un gardament la sol de 60 cm.[50] Pe baza variabilelor, inclusiv nivelurile de putere, dificultatea terenului, alunecarea și vizibilitatea, viteza maximă de traversare a terenului este estimată la 200 m pe zi prin navigarea automată.[49] Roverul a aterizat la aproximativ 10 km de baza Muntelui Sharp,[51] (numit oficial Aeolis Mons ) și era de așteptat să traverseze un minim de 19 km în timpul primilor săi doi ani de misiune.[52] Poate călători până la 90 m pe oră, dar viteza medie este de aproximativ 30 m pe oră.[52] Vehiculul este 'condus' de mai mulți operatori iar liderul grupului sistemelor autonome, mobilității și sistemelor robotice de la JPL este Vandi Verma,[53][54] care a co-scris limbajul PLEXIL folosit pentru funcționarea roverului.[55][56][57]
Instrumente
modificare
Strategia generală de analiză a eșantioanelor începe cu camere de înaltă rezoluție care caută caracteristici de interes. Dacă o anumită suprafață prezintă interes, Curiosity poate vaporiza o mică parte din ea cu un laser cu infraroșu și examinează semnătura spectrului rezultat pentru a interoga compoziția elementară a rocilor. Dacă semnătura este interesantă, roverul folosește brațul său lung pentru a se roti pe un microscop și un spectrometru cu raze X pentru a arunca o privire mai atentă. În cazul în se justifică o analiză suplimentară, Curiosity poate să furnizeze o mostră pulbere laboratoarelor de analiză SAM sau CheMin din interiorul roverului.[58][59][60] Camerele MastCam, Mars Hand Lens Imager (MAHLI) și Mars Descent Imager (MARDI) au fost dezvoltate de Malin Space Science Systems și toate au componente comune de proiectare.[61][62][63][64][65][66]
În total, roverul are 17 camere: HazCams (8), NavCams (4), MastCams (2), MAHLI (1), MARDI (1) și ChemCam (1);[67] cinci dintre acestea sunt utilizate pentru efectuarea de experimente științifice iar restul de douăsprezece pentru deplasare.
Sistemul MastCam
modificare
Sistemul MastCam este alcătuit din două camere color fiecare dotată cu un senzor CCD, care oferă imagini multiple cu culori reale [62] cu rezoluție de 1600×1200 pixeli și până la 10 cadre pe secundă video comprimat la 720p (1280×720).[68]
Una din camerele MastCam este o cameră cu unghi mediu (MAC), care are o distanță focală de 34 mm, un câmp de vedere de 15° și poate obține o scală de 22 cm/pixel. Cealaltă cameră este o cameră cu unghi îngust (NAC), care are o distanță focală de 100 mm, un câmp de vedere de 5,1° și poate obține o scală de 7,4 cm/pixel.[62] Malin a dezvoltat, de asemenea, o pereche de MastCams cu lentile zoom,[69] dar acestea nu au fost incluse în rover din cauza timpului necesar pentru testarea noului hardware și a noii date de lansare din noiembrie 2011.[70] Totuși, versiunea îmbunătățită a zoom-ului a fost selectată pentru a fi inclusă în misiunea Mars 2020 ca Mastcam-Z.[71]
Fiecare cameră este dotată cu o memorie flash de 8 GB, capabilă să stocheze peste 5.500 de imagini brute și poate aplica compresie în timp real fără pierderi de date.[62] Camerele au o capacitate de autofocalizare care le permite să se concentreze asupra obiectelor de la 2,1 m la o întindere nesfârșită.[65] În plus față de filtrul fix RGBG Bayer, fiecare cameră are un filtru rotativ cu opt poziții. În timp ce filtrul Bayer reduce fluxul luminos vizibil, toate cele trei culori sunt în mare parte transparente la lungimi de undă mai mari de 700 nm și au un efect minim asupra acestor observații în infraroșu.[62] Fiecare fotografie este mai întâi trimisă pe Pământ la o rezoluție mult redusă (200x150 pixeli) pentru a permite oamenilor de știință NASA să decidă dacă este necesar retransmiterea imaginii la rezoluție completă.
ChemCam
modificare
ChemCam este un instrument care permite analiza de la distanță a naturii, compoziției chimice și a stării de degradare a rocilor. ChemCam este alcătuit dintr-un laser (LIBS - Laser-Induced Breakdown Spectrometer) și o cameră (RMI - Remote Micro-Imager). Scopul laserului este de a furniza informații despre compoziția rocilor și a solului, în timp ce RMI oferă oamenilor de știință imagini de înaltă rezoluție a zonei de prelevare a probei.[72][73]

LIBS poate trage într-o rocă de la o distanță de până la 7 metri cu o viteză de 50-70 de impulsuri laser în 5 nanosecunde. Fiecare impuls eliberează peste 1 milion de wați de energie într-o miliardime de secundă, vaporizând o cantitate mică din rocă care formează un halou ionizat [74] și care este apoi împărțit, în componentele sale, în funcție de lungimile de undă, de către trei spectrometre, oferind cercetătorilor americani informații despre compoziția chimică.
ChemCam are capacitatea de a analiza până la 6144 de lungimi de undă diferite în spectrul ultraviolet, infraroșu și cel vizibil, de la ultraviolet (240 nm) la infraroșu (800 nm)[75] cu o rezoluție de 0,09 până la 0,3 nm.[72] Prima testare laser a lui ChemCam de către Curiosity pe Marte a fost realizată pe roca N165 (denumită "Coronation"), în apropiere de Bradbury Landing, la 19 august 2012.[76][77][78] Folosind aceeași optică de colectare, RMI furnizează o imagine a contextului eșantionului analizat.
ChemCam a fost dezvoltat de laboratorul francez CESR și Laboratorul Național Los Alamos.[72][79][80]
Camere de navigație (navcams)
modificare
Roverul are două perechi de camere de navigație alb-negru, montate pe catarg, pentru a susține navigația pe teren.[81][82] Camerele au un unghi de vedere de 45° și utilizează lumină vizibilă pentru a capta imaginile stereoscopice 3D.[82][83]
Stația de monitorizare a mediului roverului (REMS)
modificareREMS (Rover Environmental Monitoring Station) este o stație meteorologică care măsoară presiunea atmosferică, umiditatea, radiația ultravioletă, viteza vântului, temperatura solului și temperatura aerului.[84] Senzorii sunt distribuiți astfel: două brațe atașate de capătul roverului, la 1,5 metri deasupra solului, care se află în două direcții la o distanță de 120° pentru a obține o bună măsurare a direcției și forței vânturilor locale. Șase fotodiode sunt situate pe puntea superioară a roverului și măsoară radiația ultravioletă în diferite lungimi de undă. Unitatea de control a instrumentului este situată în interiorul corpului roverului și este conectată la exterior printr-un canalpentru a măsura presiunea ambiantă. REMS este furnizat de ministerul spaniol al educației și științei. Echipa este condusă de Javier Gómez-Elvira de la Centrul Spaniol de Astrobiologie și include ca partener Institutul Meteorologic Finlandez.[85][86] REMS oferă noi indicii despre circulația generală de pe Marte, sistemele meteorologice la scară mică, ciclul hidrologic local, potențialul distructiv al radiației UV și habitatele subterane bazate pe interacțiunea sol-atmosferă.[85]
Camere de evitare a pericolelor (hazcams)
modificareRoverul are patru perechi de camere de navigație alb-negru numite hazcams: două perechi în față și două perechi în spate.[81][87] Acestea sunt utilizate pentru identificarea și evitarea obstacolelor în timpul acționării roverului și pentru poziționarea în siguranță a brațului robotic pe roci și sol.[87] Ele sunt dotate cu o lentilă cu un câmp vizual de 124° pentru a reconstrui o imagine tridimensională a ceea ce se află în fața și în spatele roverului, la o distanță de până la 3 metri și la o lățime de 4 metri.[87] Această imagine garantează că roverul nu se prăbușește în obstacole neașteptate și funcționează în tandem cu software-ul care permite navigatorului să facă propriile alegeri de siguranță.[87]
Mars Hand Lens Imager (MAHLI)
modificare.jpg)
MAHLI este o cameră color cu o rezoluție de 1600×1200 pixeli, situată pe brațul robotic al roverului și folosită cu precădere la obținerea de imagini cu rezoluție microscopică (de până la 14,5 micrometri pe pixel) a solului și a rocilor marțiene dar și pentru inspecția sau examinarea componentelor roverului. MAHLI are o lungime focală de 18,3 până la 21,3 mm și un câmp vizual de 33,8-38,5°.[63] MAHLI are, de asemenea, focalizare mecanică într-o gamă de distanțe de la infinit la milimetri.[63] Acest sistem poate face unele imagini cu focus continuu (focus stacking).[88] Capul camerei este echipat cu 4 LED-uri cu lumină albă pentru a ilumina ținta când este în umbră sau pe timp de noapte și 2 LED-uri cu ultraviolete pentru depistarea mineralelor flourescente. Poate să stocheze imaginile brute sau să realizeze predicții fără pierderi în timp real sau compresie JPEG. MAHLI are un autofocus, dar echipajul de la sol îl poate cere să obțină o secvență de 8 imagini ale aceluiași obiect cu focalizare diferită pentru a obține o imagine tridimensională.[89] MAHLI poate fi utilizat pentru a inspecta configurația roverului sau a terenului: poziția sa la capătul brațului permite plasarea acesteia într-o poziție mai înaltă decât camerele MASTCAM. Și această cameră a fost produsă de către Marlib Space Science Systems.
Spectrometrul cu raze X (APXS)
modificareInstrumentul APXS iradiază probele cu particule alfa și cartografiază spectrele razelor X care sunt re-emise pentru determinarea compoziției elementare a probelor.[90] Instrumentul utilizează curiu 244 ca sursă de raze X. Poate determina abundența relativă a elementelor de la sodiu la brom. Detectarea anumitor elemente cum ar fi sodiu, magneziu, aluminiu, siliciu, calciu, fier și sulf poate fi obținută după 10 minute dacă abundența lor este mai mare de 0,5%. APXS a fost dezvoltat de Agenția Spațială Canadiană.[90] Echipa APXS include membri de la Universitatea din Guelph (Canada), Universitatea din New Brunswick (Canada), Universitatea din Western Ontario (Canada), NASA, Universitatea din California (SUA) și Universitatea Cornell (SUA).[91] APXS este o versiune îmbunătățită a unui instrument care a echipat Mars Pathfinder și MER.[90][92]
Chimie și mineralogie (CheMin)
modificare


CheMin este un instrument care efectuează analiza mineralogică a probelor de rocă prin difracție a pulberii cu raze X și fluorescente.[94] CheMin este unul dintre cele patru spectrometre. Poate identifica și cuantifica abundența mineralelor de pe Marte. A fost dezvoltat de David Blake de la NASA Ames Research Centre și de Jet Propulsion Laboratory,[95] și a câștigat premiul 2013 NASA Government Invention.[96] Roverul poate preleva probe din roci iar pulberea fină rezultată este turnată în instrument printr-un tub de intrare a probelor pe partea superioară a vehiculului. Un fascicul de raze X este îndreptat spre pulbere, iar structura cristalină a mineralelor îl deviază în unghiuri caracteristice, permițând oamenilor de știință să identifice mineralele analizate.[97]
La 17 octombrie 2012, la "Rocknest", a fost efectuată prima analiză a difracției cu raze X a solului marțian. Rezultatele au arătat prezența mai multor minerale, printre care feldspat, piroxeni și olivină, și a sugerat că solul marțian analizat era similar cu "solurile bazaltice erodate" ale vulcanilor hawaiieni.[93]
Analiza probelor pe Marte (SAM)
modificare

SAM este un mini laborator care ar trebui să contribuie la determinarea habitatelor prezente și trecute ale planetei. SAM constă din trei instrumente care sunt destinate să furnizeze compoziția chimică (moleculară, elementară și izotopică) a atmosferei și a suprafeței planetei Marte. Această suită de instrumente este destinată în special căutării unor indicatori posibili ai vieții anterioare pe Marte sau a unei activități prebiotice, în principal prin cercetarea și caracterizarea moleculelor organice care se găsesc în solul marțian. SAM este alcătuit din instrumente dezvoltate de Centrul de zbor al spațiului Goddard, Laboratoire Inter-Universitaire des Systèmes Atmosphériques (LISA) (operate de CNRS din Franța și universități pariziene) și Honeybee Robotics, alături de mulți parteneri externi.[59][98][99]
Cele trei instrumente principale sunt: un spectrometru de masă Quadrupole (QMS), un cromatograf de gaz (GC) și un spectrometru laser reglabil (TLS). Aceste instrumente efectuează măsurători de precizie a raportului oxigen și izotopi de carbon în dioxid de carbon (CO2) și metan (CH4) în atmosfera planetei Marte pentru a distinge între originea lor geochimică sau biologică.[59][99][100][101][102]
Instrument de îndepărtare a prafului (DRT)
modificare

DRT (Dust Removal Tool) este o perie motorizată, care se află la capătul brațului lui Curiosity. La 6 ianuarie 2013, DRT a fost folosit pentru prima dată pe o rocă numită "Ekwir_1". Instrumentul a fost construit de Honeybee Robotics.[103]
Detector de radiații (RAD)
modificareRolul instrumentului RAD (Radiation assessment detector) este acela de a caracteriza spectrul larg de radiații găsit în interiorul navei spațiale în timpul călătoriei și în timpul staționării pe Marte. Aceste măsurători nu s-au făcut niciodată înainte în interiorul unei nave spațiale în spațiul interplanetar. Scopul său principal este de a determina nevoile de viabilitate și de protecție pentru viitorii exploratori umani, precum și de a caracteriza radiațiile de pe suprafața planetei Marte.[104] Finanțat de NASA și Agenția Spațială a Germaniei, RAD a fost dezvoltat de Institutul de Cercetare Southwest (SwRI) și de grupul de fizică extraterestră de la Universitatea din Kiel, Germania.[104][105]
Dynamic Albedo of Neutrons (DAN)
modificareInstrumentul DAN utilizează o sursă de neutroni și un detector pentru măsurarea hidrogenului sau a apei și gheții la sau în apropierea suprafeței marțiene.[106] A fost furnizat de Agenția Spațială Federală Rusă ,[107][108] și finanțat de Rusia.[109]
Mars Descent Imager (MARDI)
modificare
MARDI este o cameră color montat sub sașiul roverului și utilizată la captura de imagini, în faza de amartizare. În timpul coborârii pe suprafața marțiană, MARDI a realizat imagini color la 1600×1200 pixeli, cu o durată de expunere de 1,3 milisecunde, începând cu distanțe de la aproximativ 3,7 km până la aproximativ 5 m de sol, de patru cadre pe secundă timp de aproximativ două minute.[64][110] Camera are o memorie de 8 gigabiți care teoretic permite stocarea a 4000 de fotografii în modul RAW.[64] Fotografiile trebuie înregistrate în acest mod și comprimate înainte de a fi transmise pe Terra chiar dacă camera poate efectua această comprimare în timp real. Aceste imagini i-au ajutat pe inginerii NASA să creeze o hartă topografică a locului de amartizare și să planifice în detaliu traseul roverului. Camera a fost produsă tot de către Malin Space Science Systems. JunoCam, construită pentru sonda spațială Juno, se bazează pe MARDI.[111]
Brațul robotic
modificare
Roverul are un braț robotic lung de 2,1 m, cu un turet în formă de cruce care deține cinci dispozitive care se pot roti într-un interval de rotație de 350°.[113][114] Brațul folosește trei articulații pentru a se extinde înainte și pentru a se replia înapoi în timp ce merge. Are o masă de 30 kg iar diametrul său, inclusiv sculele montate pe el, este de aproximativ 60 cm.[115] A fost proiectat, construit și testat de MDA US Systems, pe baza brațelor robotice anterioare de la Phoenix Mars Lander, Spirit și Opportunity.[116]
Două dintre cele cinci dispozitive montate pe braț sunt instrumente in-situ sau de contact cunoscute sub numele de spectrometrul cu raze X (APXS) și camera MAHLI. Celelalte trei sunt asociate cu achiziționarea de probe și cu funcțiile de pregătire a probelor: un burghiu de percuție, o perie șiun mecanisme pentru excavarea, sortarea și distribuția probelor de sol și rocă sub formă de pulbere.[113][115] Diametrul găurii într-o rocă după găurire este de 1,6 cm și de până la 5 cm adâncime.[114][117]
La 1 decembrie 2016, motorul din interiorul burghiului a provocat o defecțiune care a împiedicat roverul să-și miște brațul robotic.[118] Defecțiunea a fost izolată în frâna de alimentare a dispozitivului de găurit,[119] iar resturile interne sunt suspectate că au provoca problema.[120] Până la 9 decembrie, operațiunile cu brațul robotic au fost au fost autorizate să continue, dar forajul a rămas suspendat pe o perioadă nedeterminată.[121] Echipa Curiosity a continuat să efectueze diagnosticarea și testarea mecanismului de foraj pe parcursul anului 2017, [122] și a reluat operațiunile de foraj la 22 mai 2018.[123]
Comparații cu alte misiuni pe Marte
modificare
Sojourner are o lungime de 65 cm, MER 1,6 m și Curiosity 3 m lungime.
Curiosity are o încărcătură avansată de echipamente științifice.[49] Este al patrulea rover NASA trimis pe Marte începând cu anul 1996. Roboții anteriori sunt: Sojourner din misiunea Mars Pathfinder (1997), Spirit (2004–2010) și Opportunity (2004–2019) din misiunea Mars Exploration Rover. Curiosity are o lungime de 2,9 m, lățime de 2,7 m și înălțime de 2,2 m,[31] fiind mai mare decât roverele Mars Exploration Rover care sunt lungi de 1,5 m și au o masă de 174 kg, incluzând 6,8 kg de instrumente științifice.[30][124][125] În comparație cu Pancam de pe Mars Exploration Rovers, MastCam-34 are o rezoluție spațială de 1,25 ori mai mare iar MastCam-100 are o rezoluție spațială de 3,67 ori mai mare.[65]
Colin Pillinger, liderul proiectului Beagle 2, a reacționat emoțional la numărul mare de tehnicieni care au monitorizat coborârea lui Curiosity, deoarece Beagle 2 a avut doar patru oameni pentru monitorizare.[126] Echipa Beagle 2 a făcut o virtute din necesitate; s-a știut că nu exista nici o șansă de a obține fonduri în Europa, la acea dată, astfel încât echipa a folosit metode inovatoare pentru a reduce costul la mai puțin de 4% din costul misiunii Curiosity.
Numele: Curiosity
modificareNumele Curiosity a fost selectat în urma unui concurs de eseuri ale elevilor, la nivel național, care a atras peste 9.000 de propuneri prin internet și poștă. Concursul a fost câștigat de o elevă în vârstă de doisprezece ani din Kansas, Clara Ma. Ca premiu, ea a câștigat o excursie la Jet Propulsion Laboratory (JPL) din Pasadena, California, unde a semnat cu numele ei direct pe roverul care era asamblat.[127]
Ma a scris în eseul ei câștigător:
„Curiozitatea este o flacără veșnică care arde în mintea tuturor. Mă face să mă dau jos din pat dimineața și să mă întreb ce surprize voi avea în ziua aceea. Curiozitatea este o forță atât de puternică. Fără ea, nu am fi cine suntem astăzi. Curiozitatea este pasiunea care ne conduce prin viața noastră de zi cu zi. Am devenit exploratori și oameni de știință cu nevoia noastră de a pune întrebări și de a ne mira.[127]”
Imagini
modificare-
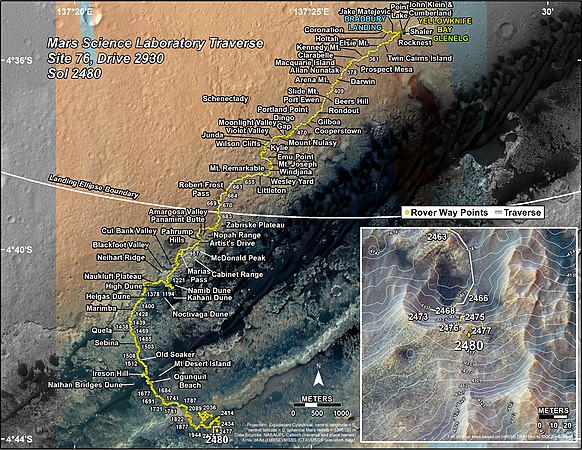 Traseul efectuat de Curiosity din 6 august 2012 până la 30 iulie 2019.
Traseul efectuat de Curiosity din 6 august 2012 până la 30 iulie 2019. -
 Meteorit găsit de Curiosity
Meteorit găsit de Curiosity


Autoportrete
modificare-
 Roca Windjana (aprilie-mai 2014)
Roca Windjana (aprilie-mai 2014) -
 Roca Buckskin (5 august 2015, sol 1065)
Roca Buckskin (5 august 2015, sol 1065) -
 Stimson (6 octombrie 2015, sol 1126)
Stimson (6 octombrie 2015, sol 1126) -
 "VeraRubin" (ianuarie 2019)
"VeraRubin" (ianuarie 2019)




Imagini panoramice
modificare





Vezi și
modificareNote
modificare- ^ Jet Propulsion Laboratory (), Launch (în engleză)
- ^ Jonathan's Space Report
- ^ Martin, Paul K. (). „NASA'S MANAGEMENT OF THE MARS SCIENCE LABORATORY PROJECT (IG-11-019)” (PDF). NASA Office of Inspector General. Arhivat din original (PDF) la . Accesat în .
- ^ a b Nelson, Jon. „Mars Science Laboratory Curiosity Rover”. NASA. Accesat în .
- ^ „Curiosity: NASA's Next Mars Rover”. NASA. . Accesat în .
- ^ Beutel, Allard (). „NASA's Mars Science Laboratory Launch Rescheduled for Nov. 26”. NASA. Accesat în .
- ^ a b Abilleira, Fernando (). 2011 Mars Science Laboratory Trajectory Reconstruction and Performance from Launch Through Landing. 23rd AAS/AIAA Spaceflight Mechanics Meeting. February 10–14, 2013. Kauai, Hawaii.
- ^ a b Amos, Jonathan (). „Nasa's Curiosity rover lifts its navigation cameras”. BBC News. Accesat în .
- ^ a b Wall, Mike (). „Touchdown! Huge NASA Rover Lands on Mars”. Space.com. Accesat în .
- ^ „Where Is Curiosity?”. mars.nasa.gov. NASA. Accesat în .
 Acest articol încorporează text dintr-o lucrare aflată în domeniul public:
Acest articol încorporează text dintr-o lucrare aflată în domeniul public:
- ^ https://mars.nasa.gov/msl/spacecraft/instruments/mastcam/ Lipsește sau este vid:
|title=(ajutor) - ^ https://mars.nasa.gov/msl/spacecraft/instruments/mahli/ Lipsește sau este vid:
|title=(ajutor) - ^ https://mars.nasa.gov/msl/spacecraft/instruments/mardi/ Lipsește sau este vid:
|title=(ajutor) - ^ https://mars.nasa.gov/msl/spacecraft/instruments/apxs/ Lipsește sau este vid:
|title=(ajutor) - ^ https://mars.nasa.gov/msl/spacecraft/instruments/chemcam/ Lipsește sau este vid:
|title=(ajutor) - ^ https://mars.nasa.gov/msl/spacecraft/instruments/chemin/ Lipsește sau este vid:
|title=(ajutor) - ^ https://mars.nasa.gov/msl/spacecraft/instruments/sam/ Lipsește sau este vid:
|title=(ajutor) - ^ https://mars.nasa.gov/msl/spacecraft/instruments/rad/ Lipsește sau este vid:
|title=(ajutor) - ^ https://mars.nasa.gov/msl/spacecraft/instruments/dan/ Lipsește sau este vid:
|title=(ajutor) - ^ https://mars.nasa.gov/msl/spacecraft/instruments/rems/ Lipsește sau este vid:
|title=(ajutor) - ^ „MSL Sol 3 Update”. NASA Television. . Accesat în .
- ^ a b „Overview”. JPL, NASA. Accesat în .
- ^ a b c „Mars Science Laboratory: Mission Science Goals”. NASA.gov. august 2012. Accesat în .
- ^ „Curiosity's mission extended indefinitely”. 3 News NZ. . Arhivat din original la . Accesat în .
- ^ Webster, Guy; Cantillo, Laurie; Brown, Dwayne (). „Five Years Ago and 154 Million Miles Away: Touchdown!”. NASA. Accesat în .
- ^ Wall, Mike (). „After 5 Years on Mars, NASA's Curiosity Rover Is Still Making Big Discoveries”. Space.com. Accesat în .
- ^ „MSL Objectives”. NASA.
- ^ Phillips, Tony (). „Curiosity, The Stunt Double”. NASA.gov. Arhivat din original la . Accesat în .
- ^ Grotzinger, John P. (). „Habitability, Taphonomy, and the Search for Organic Carbon on Mars”. Science. 343 (6169): 386–387. Bibcode:2014Sci...343..386G. doi:10.1126/science.1249944. PMID 24458635.
- ^ a b Watson, Traci (). „Troubles parallel ambitions in NASA Mars project”. USA Today. Accesat în .
- ^ a b „MSL at a glance - CNES”. Cnes.fr. Accesat în .
- ^ a b „Multi-Mission Radioisotope Thermoelectric Generator (MMRTG)” (PDF). NASA/JPL. octombrie 2013. Arhivat din original (PDF) la . Accesat în .
- ^ a b „Mars Exploration: Radioisotope Power and Heating for Mars Surface Exploration” (PDF). NASA/JPL. . Arhivat din original (PDF) la . Accesat în .
- ^ Ritz, Fred; Peterson, Craig E. (). Multi-Mission Radioisotope Thermoelectric Generator (MMRTG) Program Overview (PDF). 2004 IEEE Aerospace Conference. March 6–13, 2004. Big Sky, Montana. doi:10.1109/AERO.2004.1368101. Arhivat din original (PDF) la .
- ^ Cataldo, Robert L.; Bennett, Gary L. (). „U.S. Space Radioisotope Power Systems and Applications: Past, Present and Future” (PDF). În Singh, Nirmal. Radioisotopes: Applications in Physical Sciences. InTech. doi:10.5772/23914. ISBN 978-953-307-510-5.
- ^ Campbell, Joseph (). „Fueling the Mars Science Laboratory” (PDF). Idaho National Laboratory. Arhivat din original (PDF) la . Accesat în .
- ^ a b c d Makovsky, Andre; Ilott, Peter; Taylor, Jim (noiembrie 2009). Mars Science Laboratory Telecommunications System Design (PDF). DESCANSO Design and Performance Summary Series. 14. NASA/Jet Propulsion Laboratory.
- ^ Watanabe, Susan (). „Keeping it Cool (...or Warm!)”. NASA/JPL. Arhivat din original la . Accesat în .
- ^ „Mars Science Laboratory: Mission: Rover: Brains”. NASA/JPL. Accesat în .
- ^ Bajracharya, Max; Maimone, Mark W.; Helmick, Daniel (decembrie 2008). „Autonomy for Mars rovers: past, present, and future”. Computer. 41 (12): 45. doi:10.1109/MC.2008.515. ISSN 0018-9162.
- ^ „Mars-Earth distance in light minutes”. WolframAlpha. Accesat în .
- ^ „Curiosity's data communication with Earth”. NASA. Accesat în .
- ^ „NASA's Curiosity Rover Maximizes Data Sent to Earth by Using International Space Data Communication Standards”. Arhivat din original la . Accesat în .
- ^ „Next Mars Rover Sports a Set of New Wheels”. NASA/JPL. Arhivat din original la . Accesat în .
- ^ „Watch NASA's Next Mars Rover Being Built Via Live 'Curiosity Cam'”. NASA. . Arhivat din original la . Accesat în .
- ^ „New Mars Rover to Feature Morse Code”. National Association for Amateur Radio.
- ^ Marlow, Jeffrey (). „Looking Toward the Open Road”. JPL - Martian Diaries. NASA. Accesat în .
- ^ Lakdawalla, Emily (). „Curiosity wheel damage: The problem and solutions”. The Planetary Society Blogs. The Planetary Society. Accesat în .
- ^ a b c „Mars Science Laboratory - Facts” (PDF). Jet Propulsion Laboratory, NASA. martie 2012. Arhivat din original (PDF) la . Accesat în .
- ^ „First drive”.
- ^ Gorman, Steve (). „Curiosity beams Mars images back”. Stuff - Science. Accesat în .
- ^ a b „Mars Science Laboratory”. NASA. Arhivat din original la . Accesat în .
- ^ „Vandi Verma”. ResearchGate. Accesat în .
- ^ „Dr. Vandi Verma Group Supervisor”. Jet Propulsion Laboratory. CIT. Arhivat din original la . Accesat în .
- ^ Estlin, Tara; Jonsson, Ari; Pasareanu, Carina; Simmons, Reid; Tso, Kam; Verma, Vandi. „Plan Execution Interchange Language (PLEXIL)” (PDF). NASA Technical Reports Server. Accesat în .
- ^ „Bibliography of PLEXIL-related publications, organized by category”. Plexil souceforge. Accesat în .
- ^ „Main page: NASA applications”. PLEXIL sourceforge. Accesat în .
- ^ Amos, Jonathan (). „Gale Crater: Geological 'sweet shop' awaits Mars rover”. BBC News. Accesat în .
- ^ a b c „MSL Science Corner: Sample Analysis at Mars (SAM)”. NASA/JPL. Arhivat din original la . Accesat în .
- ^ „Overview of the SAM instrument suite”. NASA. Arhivat din original la .
- ^ Malin, M. C.; Bell, J. F.; Cameron, J.; Dietrich, W. E.; Edgett, K. S.; et al. (). The Mast Cameras and Mars Descent Imager (MARDI) for the 2009 Mars Science Laboratory (PDF). Lunar and Planetary Science XXXVI. p. 1214. Bibcode:2005LPI....36.1214M.
- ^ a b c d e „Mast Camera (MastCam)”. NASA/JPL. Arhivat din original la . Accesat în .
- ^ a b c „Mars Hand Lens Imager (MAHLI)”. NASA/JPL. Arhivat din original la . Accesat în .
- ^ a b c „Mars Descent Imager (MARDI)”. NASA/JPL. Arhivat din original la . Accesat în .
- ^ a b c „Mars Science Laboratory (MSL): Mast Camera (MastCam): Instrument Description”. Malin Space Science Systems. Accesat în .
- ^ Stern, Alan; Green, Jim (). „Mars Science Laboratory Instrumentation Announcement from Alan Stern and Jim Green, NASA Headquarters”. SpaceRef.com. Accesat în .[nefuncțională]
- ^ Mann, Adam (). „The Photo-Geek's Guide to Curiosity Rover's 17 Cameras”. Wired. Accesat în .
- ^ Klinger, Dave (). „Curiosity says good morning from Mars (and has busy days ahead)”. Ars Technica. Accesat în .
- ^ „Mars Science Laboratory (MSL) Mast Camera (MastCam)”. Malin Space Science Systems. Accesat în .
- ^ David, Leonard (). „NASA Nixes 3-D Camera for Next Mars Rover”. Space.com. Accesat în .
- ^ Bell III, J. F.; Maki, J. N.; Mehall, G. L.; Ravine, M. A.; Caplinger, M. A. (). Mastcam-Z: A Geologic, Stereoscopic, and Multispectral Investigation on the NASA Mars-2020 Rover (PDF). International Workshop on Instrumentation for Planetary Missions. November 4–7, 2014. Greenbelt, Maryland. Arhivat din original (PDF) la . Accesat în .
- ^ a b c „MSL Science Corner: Chemistry & Camera (ChemCam)”. NASA/JPL. Arhivat din original la . Accesat în .
- ^ „Spacecraft: Surface Operations Configuration: Science Instruments: ChemCam”. Arhivat din original la .
- ^ Vieru, Tudor (). „Curiosity's Laser Reaches 100,000 Firings on Mars”. Softpedia. Accesat în .
- ^ „Rover's Laser Instrument Zaps First Martian Rock”. . Arhivat din original la . Accesat în .
- ^ Webster, Guy; Agle, D.C. (). „Mars Science Laboratory/Curiosity Mission Status Report”. NASA. Accesat în .
- ^ „'Coronation' Rock on Mars”. NASA. Accesat în .
- ^ Amos, Jonathan (). „Nasa's Curiosity rover prepares to zap Martian rocks”. BBC News. Accesat în .
- ^ Salle, B.; Lacour, J. L.; Mauchien, P.; Fichet, P.; Maurice, S.; et al. (). „Comparative study of different methodologies for quantitative rock analysis by Laser-Induced Breakdown Spectroscopy in a simulated Martian atmosphere” (PDF). Spectrochimica Acta Part B-Atomic Spectroscopy. 61 (3): 301–313. Bibcode:2006AcSpe..61..301S. doi:10.1016/j.sab.2006.02.003.
- ^ Wiens, R.C.; Maurice, S.; Engel, A; Fabry, V. J.; Hutchins, D. A.; et al. (). „Corrections and Clarifications, News of the Week”. Science. 322 (5907): 1466. doi:10.1126/science.322.5907.1466a. PMC 1240923
 .
.
- ^ a b „Mars Science Laboratory Rover in the JPL Mars Yard”. NASA/JPL. Arhivat din original la . Accesat în .
- ^ „First NavCam mosaic”.
- ^ Gómez-Elvira, J.; Haberle, B.; Harri, A.; Martinez-Frias, J.; Renno, N.; Ramos, M.; Richardson, M.; de la Torre, M.; Alves, J.; Armiens, C.; Gómez, F.; Lepinette, A.; Mora, L.; Martín, J.; Martín-Torres, J.; Navarro, S.; Peinado, V.; Rodríguez-Manfredi, J. A.; Romeral, J.; Sebastián, E.; Torres, J.; Zorzano, M. P.; Urquí, R.; Moreno, J.; Serrano, J.; Castañer, L.; Jiménez, V.; Genzer, M.; Polko, J. (februarie 2011). „Rover Environmental Monitoring Station for MSL mission” (PDF). 4th International Workshop on the Mars Atmosphere: Modelling and Observations: 473. Bibcode:2011mamo.conf..473G. Accesat în .
- ^ a b „MSL Science Corner: Rover Environmental Monitoring Station (REMS)”. NASA/JPL. Arhivat din original la . Accesat în .
- ^ „Mars Science Laboratory Fact Sheet” (PDF). NASA/JPL. Accesat în .
- ^ a b c d „Mars Science Laboratory: Mission: Rover: Eyes and Other Senses: Four Engineering Hazcams (Hazard Avoidance Cameras)”. NASA/JPL. Accesat în .
- ^ Edgett, Kenneth S. „Mars Hand Lens Imager (MAHLI)”. NASA. Arhivat din original la . Accesat în .
- ^ „3D View of MAHLI Calibration Target”. NASA. . Accesat în .
- ^ a b c „MSL Science Corner: Alpha Particle X-ray Spectrometer (APXS)”. NASA/JPL. Arhivat din original la . Accesat în .
- ^ „40th Lunar and Planetary Science Conference” (PDF). .
„41st Lunar and Planetary Science Conference” (PDF). . - ^ Rieder, R.; Gellert, R.; Brückner, J.; Klingelhöfer, G.; Dreibus, G.; et al. (). „The new Athena alpha particle X-ray spectrometer for the Mars Exploration Rovers”. Journal of Geophysical Research. 108 (E12): 8066. Bibcode:2003JGRE..108.8066R. doi:10.1029/2003JE002150.
- ^ a b Brown, Dwayne (). „NASA Rover's First Soil Studies Help Fingerprint Martian Minerals”. NASA. Arhivat din original la . Accesat în .
- ^ „MSL Chemistry & Mineralogy X-ray diffraction(CheMin)”. NASA/JPL. Accesat în .
- ^ Sarrazin, P.; Blake, D.; Feldman, S.; Chipera, S.; Vaniman, D.; et al. (). „Field deployment of a portable X-ray diffraction/X-ray fluorescence instrument on Mars analog terrain”. Powder Diffraction. 20 (2): 128–133. Bibcode:2005PDiff..20..128S. doi:10.1154/1.1913719.
- ^ Hoover, Rachel (). „Ames Instrument Helps Identify the First Habitable Environment on Mars, Wins Invention Award”. NASA. Arhivat din original la . Accesat în .
- ^ Anderson, Robert C.; Baker, Charles J.; Barry, Robert; Blake, David F.; Conrad, Pamela; et al. (). „Mars Science Laboratory Participating Scientists Program Proposal Information Package” (PDF). NASA/Jet Propulsion Laboratory. Accesat în .
- ^ Cabane, M.; Coll, P.; Szopa, C.; Israël, G.; Raulin, F.; et al. (). „Did life exist on Mars? Search for organic and inorganic signatures, one of the goals for "SAM" (sample analysis at Mars)” (PDF). Advances in Space Research. 33 (12): 2240–2245. Bibcode:2004AdSpR..33.2240C. doi:10.1016/S0273-1177(03)00523-4.
- ^ a b „Sample Analysis at Mars (SAM) Instrument Suite”. NASA. octombrie 2008. Arhivat din original la . Accesat în .
- ^ Tenenbaum, D. (). „Making Sense of Mars Methane”. Astrobiology Magazine. Accesat în .
- ^ Tarsitano, C. G.; Webster, C. R. (). „Multilaser Herriott cell for planetary tunable laser spectrometers”. Applied Optics. 46 (28): 6923–6935. Bibcode:2007ApOpt..46.6923T. doi:10.1364/AO.46.006923. PMID 17906720.
- ^ Mahaffy, Paul R.; Webster, Christopher R.; Cabane, Michel; Conrad, Pamela G.; Coll, Patrice; et al. (). „The Sample Analysis at Mars Investigation and Instrument Suite”. Space Science Reviews. 170 (1–4): 401–478. Bibcode:2012SSRv..tmp...23M. doi:10.1007/s11214-012-9879-z.
- ^ Moskowitz, Clara (). „NASA's Curiosity Rover Brushes Mars Rock Clean, a First”. Space.com. Accesat în .
- ^ a b „SwRI Radiation Assessment Detector (RAD) Homepage”. Southwest Research Institute. Accesat în .
- ^ „RAD”. NASA.
- ^ „Laboratory for Space Gamma Spectroscopy - DAN”. Laboratory for Space Gamma Spectroscopy. Arhivat din original la . Accesat în .
- ^ „MSL Science Corner: Dynamic Albedo of Neutrons (DAN)”. NASA/JPL. Arhivat din original la . Accesat în .
- ^ Litvak, M. L.; Mitrofanov, I. G.; Barmakov, Yu. N.; Behar, A.; Bitulev, A.; et al. (). „The Dynamic Albedo of Neutrons (DAN) Experiment for NASA's 2009 Mars Science Laboratory”. Astrobiology. 8 (3): 605–12. Bibcode:2008AsBio...8..605L. doi:10.1089/ast.2007.0157. PMID 18598140.
- ^ „Mars Science Laboratory: Mission”. NASA JPL. Accesat în .
- ^ „Mars Descent Imager (MARDI) Update”. Malin Space Science Systems. . Accesat în .
- ^ „Junocam, Juno Jupiter Orbiter”. Malin Space Science Systems. Accesat în .
- ^ Anderson, Paul Scott (). „Curiosity 'hammers' a rock and completes first drilling tests”. themeridianijournal.com. Arhivat din original la . Accesat în .
- ^ a b „Curiosity Rover - Arm and Hand”. JPL. NASA. Accesat în .
- ^ a b Jandura, Louise. „Mars Science Laboratory Sample Acquisition, Sample Processing and Handling: Subsystem Design and Test Challenges” (PDF). JPL. NASA. Accesat în .
- ^ a b „Curiosity Stretches its Arm”. JPL. NASA. . Arhivat din original la . Accesat în .
- ^ Billing, Rius; Fleischner, Richard. „Mars Science Laboratory Robotic Arm” (PDF). MDA US Systems. Arhivat din original (PDF) la . Accesat în .
- ^ „MSL Participating Scientists Program - Proposal Information Package” (PDF). Washington University. . Accesat în .
- ^ „NASA Is Trying to Get Mars Rover Curiosity's Arm Unstuck”. Popular Mechanics. Associated Press. . Accesat în .
- ^ Wall, Mike (). „Drill Issue Continues to Afflict Mars Rover Curiosity”. Space.com. Accesat în .
- ^ Clark, Stephen (). „Internal debris may be causing problem with Mars rover's drill”. Spaceflight Now. Accesat în .
- ^ „Sols 1545-1547: Moving again!”. NASA Mars Rover Curiosity: Mission Updates. NASA. .
- ^ Lakdawalla, Emily (). „Curiosity's balky drill: The problem and solutions”. The Planetary Society. Accesat în .
- ^ Curiosity Rover is Drilling Again. David Dickinon, Sky and Telescope. 4 June 2018.
- ^ Mars Rovers: Pathfinder, MER (Spirit and Opportunity), and MSL. Pasadena, California. 12 aprilie 2008. https://www.youtube.com/watch?v=D7kBTZAGhbs. Accesat la 22 septembrie 2011.
- ^ „Mars Exploration Rover Launches” (PDF). NASA. iunie 2003. Arhivat (PDF) din originalul de la .
- ^ „Watching Curiosity on Mars makes me feel like athlete who didn't win a medal”. The Sun. .
- ^ a b Brown, Dwayne C.; Buis, Alan; Martinez, Carolina (). „NASA Selects Student's Entry as New Mars Rover Name”. NASA / Jet Propulsion Laboratory. Arhivat din original la . Accesat în .
- ^ Williams, John (). „A 360-degree 'street view' from Mars”. PhysOrg. Accesat în .
- ^ Bodrov, Andrew (). „Mars Panorama - Curiosity rover: Martian solar day 2”. 360Cities. Arhivat din original la . Accesat în .
Eroare la citare: Eticheta <ref> definită în <references> cu numele „MAHLI” nu are conținut.
Eroare la citare: Eticheta <ref> definită în <references> cu numele „MARDI” nu are conținut.
<ref> definită în <references> cu numele „Mars Hand Lens Imager (MAHLI)” nu are conținut.
Legături externe
modificare
|
- Curiosity Rover - Home Page - NASA/JPL
- MSL - NASA Updates - *LIVE* TBA Arhivat în , la Wayback Machine. Schedule (NASA-TV) (NASA-Audio) Arhivat în , la Wayback Machine.