Coordonate generalizate (fizică)
În mecanica analitică, coordonatele generalizate constituie un set de parametri care sunt utilizați pentru a descrie configurația unui sistem într-un spațiu de configurație. Acești parametri ar trebui să definească în mod unic configurația sistemului în comparație cu o stare de referință.[1] Vitezele generalizate corespund derivatelor în timp ale coordonatelor generalizate ale sistemului. Adjectivul „generalizat” distinge acești parametri de utilizarea tradițională a termenului „coordonată”, care se referă la coordonatele carteziene.
Un exemplu de coordonată generalizată ar putea fi descrierea poziției unui pendul prin unghiul pe care pendulul îl formează cu verticala, în loc de pozițiile x și y ale bobului pendulului.
Deși pot exista numeroase opțiuni pentru coordonatele generalizate ale unui sistem fizic, acestea sunt de obicei alese pentru a simplifica calculele, cum ar fi rezolvarea ecuațiilor de mișcare ale sistemului. Dacă coordonatele sunt independente una de cealaltă, numărul de coordonate generalizate independente este definit de numărul de grade de libertate ale sistemului.[2][3]
Coordonatele generalizate sunt asociate cu momentele generalizate pentru a furniza coordonate canonice în spațiul fazelor.
Constrângeri și grade de libertate
modificareCoordonatele generalizate sunt adesea selectate pentru a furniza numărul minim de coordonate independente care definesc configurația unui sistem. Aceasta simplifică formularea ecuațiilor de mișcare ale lui Lagrange. Cu toate acestea, este posibil ca un set util de coordonate generalizate să fie dependent, ceea ce implică faptul că sunt legate de una sau mai multe ecuații de constrângere.
Constrângeri holonomice
modificare


Lungimea arcului s de-a lungul curbei reprezintă o coordonată generalizată validă, deoarece determină în mod unic poziția pe curbă. În schimb, unghiul θ nu este o coordonată generalizată validă, deoarece există mai multe poziții posibile pentru o singură valoare a lui θ.
Pentru un sistem de N particule în spațiul de coordonate reale 3D, vectorul de poziție al fiecărei particule poate fi exprimat ca un tuplu de 3 elemente în coordonate carteziene:
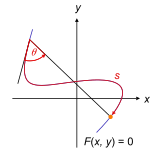
Traiectorie cu curbă deschisă F(x, y) = 0. Raza poate avea mai multe puncte de intersecție cu traiectoria. 
Traiectorie cu curbă închisă C(x, y) = 0. Traiectoria poate avea puncte de intersecție cu ea însăși.



Oricare dintre vectorii de poziție poate fi notat ca rk, unde k = 1, 2, …, N etichetează particulele. O constrângere holonomică reprezintă o ecuație de constrângere specifică pentru particula k[4][a]

care leagă toate cele trei coordonate spațiale ale unei particule, făcându-le interdependente. Constrângerea poate varia în timp, astfel încât variabila timp t va apărea explicit în ecuațiile de constrângere. În orice moment, o coordonată poate fi determinată din celelalte. De exemplu, dacă sunt cunoscute xk și zk, atunci și yk poate fi determinată. O ecuație de constrângere corespunde unei singure constrângeri. Dacă există C constrângeri, fiecare dintre ele are o ecuație, rezultând un total de C ecuații de constrângere. Nu este necesar ca fiecare particulă să aibă o ecuație de constrângere specifică. Un sistem fără constrângeri nu are ecuații de constrângere.


Până acum, configurația sistemului este definită de 3N mărimi, dar pot fi eliminate C coordonate, câte una pentru fiecare ecuație de constrângere. Numărul de coordonate independente este n = 3N − C . (În spații dimensionale D, configurația originală ar necesita ND coordonate, iar reducerea prin constrângeri ar rezulta în n = ND − C). Este ideal să se utilizeze numărul minim de coordonate necesare pentru a defini configurația întregului sistem, beneficiind în același timp de constrângerile impuse acestuia. Aceste mărimi sunt cunoscute sub numele de coordonate generalizate în acest context și sunt notate ca qj(t). Este convenabil să fie colectate într-un tuplu n.

care reprezintă un punct din spațiul de configurare al sistemului. Ele sunt independente una de cealaltă și pot fi funcții ale timpului. Din punct de vedere geometric, acestea pot reprezenta lungimi de-a lungul liniilor drepte, lungimi de arc de-a lungul curbelor sau unghiuri, nu neapărat coordonate carteziene sau alte sisteme de coordonate ortogonale standard. Numărul de coordonate generalizate este egal cu numărul de grade de libertate ale sistemului. Un grad de libertate corespunde unei mărimi care poate modifica configurația sistemului, de exemplu unghiul unui pendul sau lungimea arcului parcurs de o mărgică pe un fir.
Alegerea coordonatelor generalizate este crucială pentru simplificarea ecuațiilor de mișcare ale sistemului. Dacă, din constrângerile sistemului, se pot identifica un număr de variabile independente egal cu numărul de grade de libertate, acestea pot fi utilizate ca coordonate generalizate.[5] Vectorul de poziție rk al particulei k este o funcție a tuturor celor n coordonate generalizate (și, prin urmare, a timpului),[6][7][8][5][nb 1]

iar coordonatele generalizate pot fi interpretate ca parametri asociați cu constrângerea.
Derivatele în timp ale coordonatelor generalizate q sunt numite viteze generalizate,

(fiecare punct deasupra unei cantități indică o singură derivată în timp). Vectorul viteză vk al particulei este derivata totală a vectorului de poziție rk în raport cu timpul


și, prin urmare, depinde atât de vitezele generalizate, cât și de coordonatele generalizate. Având libertatea de a specifica valorile inițiale ale coordonatelor generalizate și ale vitezelor generalizate separat, coordonatele generalizate qj și vitezele generalizate dqj/dt pot fi considerate variabile independente.
Constrângeri neholonomice
modificareUn sistem mecanic poate avea constrângeri atât asupra coordonatelor generalizate, cât și asupra derivatelor acestora. Constrângerile de acest tip sunt denumite constrângeri neholonomice. Constrângerile neholonomice de ordinul întâi pot fi exprimate sub forma:

Un exemplu de constrângere neholonomică de ordinul întâi este o roată care se rostogolește pe o suprafață plană. Restricția impusă de suprafața plană este că punctul de contact dintre roată și suprafață nu poate să se deplaseze vertical. Constrângerile neholonomice pot implica și derivate de ordin superior, cum ar fi accelerațiile generalizate. De exemplu, o constrângere neholonomică de ordinul al doilea ar putea limita viteza de rotație a unei roți.
Mărimi fizice în coordonate generalizate
modificareEnergie cinetică
modificareEnergia cinetică totală a sistemului mecanic reprezintă energia sa de mișcare și este definită ca:[9]

în care · este produsul scalar. Energia cinetică depinde doar de vitezele vk și nu de coordonatele rk în sine. Cu toate acestea, o observație importantă este:[10]

care ilustrează că energia cinetică este, în general, o funcție a vitezelor generalizate, a coordonatelor și a timpului, dacă și constrângerile variază cu timpul, deci T = T(q, dq/dt, t).
În cazul în care constrângerile asupra particulelor sunt independente de timp, toate derivatele parțiale în raport cu timpul sunt zero, iar energia cinetică devine o funcție omogenă de gradul 2 în vitezele generalizate.
Tot pentru cazul independent de timp, această expresie este echivalentă cu luarea elementului de linie la pătrat al traiectoriei particulei k,

și împărțirea la diferența pătrată în timp, dt2, pentru a obține viteza la pătrat a particulei k. Astfel, pentru constrângeri independente de timp, este suficient să se cunoască elementul de linie pentru a obține rapid energia cinetică a particulelor și, prin urmare, Lagrangianul.[11]
Este instructiv să se analizeze diferitele cazuri de coordonate polare în 2D și 3D, datorită apariției lor frecvente. În coordonatele polare 2D (r, θ),

în coordonate polare 3D (r, θ, z),

în coordonate sferice 3D (r, θ, φ),

Momentul generalizat
modificareMomentul generalizat conjugat canonic la coordonata qi este definit de:

Dacă Lagrangianul L nu depinde de o coordonată qi, atunci din ecuațiile Euler-Lagrange rezultă că impulsul generalizat corespunzător va fi o mărime conservată, deoarece derivata temporală este zero, ceea ce înseamnă că impulsul este o constantă a mișcării;

Exemple
modificareMărgele pe un fir
modificare
Pentru o mărgică care alunecă pe un fir fără frecare, supusă doar gravitației în spațiul 2D, constrângerea pe mărgică poate fi exprimată sub forma f (r) = 0 unde poziția mărgicii este r = (x(s), y(s)). Parametrul s reprezintă lungimea arcului de-a lungul curbei, pornind de la un punct de pe fir. Alegerea coordonatelor generalizate q = s este potrivită pentru sistem. Este necesară o singură coordonată în loc de două, deoarece poziția mărgelei poate fi parametrizată printr-un singur număr, s. Ecuația constrângerii leagă coordonatele x și y. Prin urmare, una dintre coordonate este determinată de cealaltă. Forța de constrângere este forța de reacție pe care firul o exercită asupra mărgelei pentru a o menține pe fir. Forța aplicată fără constrângere este gravitația care acționează asupra mărgelei.
Să presupunem că firul își schimbă forma în timp, prin îndoire. Atunci ecuația constrângerii și poziția particulei devin:

Ambele depind acum de timpul t din cauza schimbării coordonatelor pe măsură ce firul își modifică forma. Timpul apare implicit prin coordonate și explicit în ecuațiile de constrângere.
Pendul simplu
modificare

Relația dintre utilizarea coordonatelor generalizate și coordonatelor carteziene pentru caracterizarea mișcării unui sistem mecanic poate fi ilustrată prin studierea dinamicii constrânse a unui pendul simplu.[12][13]
Un pendul simplu constă dintr-o masă M atârnând de un punct de pivot, fiind constrâns să se miște pe un cerc cu raza L. Poziția masei este definită de vectorul de coordonate r = (x, y) măsurat în planul cercului, unde y este pe direcția verticală. Coordonatele x și y sunt legate prin ecuația cercului:

care constrânge mișcarea lui M. Această ecuație oferă, de asemenea, o constrângere asupra componentelor vitezei,

Acum introducem coordonatele generalizate θi (i = 1, 2), care definesc poziția unghiulară a fiecărei mase a pendulului dublu față de direcția verticală. În acest caz, avem

Utilizarea lui θ pentru a defini configurația acestui sistem evită constrângerea oferită de ecuația cercului.
Observați că forța de gravitație care acționează asupra masei ste formulată în coordonate carteziene obișnuite,


unde g este accelerația datorată gravitației.
Lucrul virtual al gravitației asupra masei m în timp ce aceasta urmează traiectoria r este dat de

Variația δr poate fi calculată în funcție de coordonatele x și y, sau în funcție de parametrul θ,

Astfel, lucrul virtual este dat de

Observați că coeficientul lui δy este componenta y a forței aplicate. În același mod, coeficientul lui δθ este cunoscut ca forța generalizată de-a lungul coordonatei generalizate θ, dată de

Pentru a completa analiza, se consideră energia cinetică T a masei, folosind viteza,

deci,

Forma lui D'Alembert a principiului lucrului virtual pentru pendul în funcție de coordonatele x și y este dată de:

Astfel rezultă cele trei ecuații

în cele trei necunoscute, x, y și λ.
Folosind parametrul θ, acele ecuații iau forma

care devine,

sau

Această formulare produce o singură ecuație, deoarece există un singur parametru și nicio ecuație de constrângere.
Acest lucru arată că parametrul θ este o coordonată generalizată care poate fi utilizată în același mod ca și coordonatele carteziene x și y pentru a analiza pendulul.
Pendul dublu
modificare
Beneficiile coordonatelor generalizate devin evidente în cazul analizei unui pendul dublu. Pentru cele două mase mi (i = 1, 2), fie ri = (xi, yi), i = 1, 2, definește cele două traiectorii ale acestora. Acești vectori satisfac cele două ecuații de constrângere,

și

Formularea ecuațiilor lui Lagrange pentru acest sistem generează șase ecuații în cele patru coordonate carteziene xi, yi (i = 1, 2) și cei doi multiplicatori Lagrange λi (i = 1, 2) care rezultă din cele două ecuații de constrângere.
Acum se introduce parametrul θ, care definește poziția unghiulară a lui față de direcția verticală. Acesta poate fi utilizat pentru a defini coordonatele și , astfel încât




Forța gravitației care acționează asupra maselor este dată de:

unde g este accelerația datorată gravitației. Prin urmare, lucrul virtual al gravitației asupra celor două mase, în timp ce acestea urmează traiectoriile ri (i = 1, 2), este dat de formula

Variațiile δri (i = 1, 2) pot fi calculate ca fiind

Astfel, lucrul virtual este dat de

iar forțele generalizate sunt

Calculați energia cinetică a acestui sistem ca fiind

Ecuația Euler–Lagrange produce două ecuații în coordonatele generalizate necunoscute θi (i = 1, 2) date de[14]

și

Utilizarea coordonatelor generalizate θi (i = 1, 2) oferă o alternativă la formularea carteziană a dinamicii pendulului dublu.
Pendul sferic
modificare
Pentru un exemplu 3D, considerăm un pendul sferic cu lungime constantă l liber să se balanseze în orice direcție unghiulară sub acțiunea gravitației, constrângerea impusă bobului pendulului poate fi exprimată sub forma

unde se poate scrie poziția bobului pendulului astfel

în care (θ, φ) sunt unghiurile polare sferice polare sferice, deoarece bob-ul se mișcă pe suprafața unei sfere. Poziția r se măsoară de-a lungul punctului de suspensie până la bob, tratat aici ca o particulă punctiformă. O alegere logică a coordonatelor generalizate pentru a descrie mișcarea sunt unghiurile (θ, φ). Sunt necesare doar două coordonate în loc de trei, deoarece poziția bobului poate fi parametrizată prin două numere, iar ecuația de constrângere conectează cele trei coordonate (x, y, z), astfel încât oricare dintre ele este determinată de celelalte două.
Coordonate generalizate și lucru virtual
modificarePrincipiul lucrului virtual afirmă că, dacă un sistem este în echilibru static, lucrul virtual al forțelor aplicate este zero pentru toate deplasările virtuale ale sistemului din această stare. Altfel spus, δW = 0 pentru orice variație δr.[15] Când este formulat în termeni de coordonate generalizate, acest principiu este echivalent cu cerința ca forțele generalizate să fie zero pentru orice deplasare virtuală, deci Fi = 0.
Fie ca forțele care acționează asupra sistemului să fie notate cu Fj (j = 1, 2, …, m) și aplicate punctelor cu coordonate carteziene rj (j = 1, 2, …, m). Atunci, lucrul virtual generat de o deplasare virtuală din poziția de echilibru este dat de:

unde δrj (j = 1, 2, …, m) reprezintă deplasările virtuale ale fiecărui punct din corp.
Să presupunem acum că fiecare δrj depinde de coordonatele generalizate qi (i = 1, 2, …, n), atunci

și

Cei n termeni

reprezintă forțele generalizate care acționează asupra sistemului. Kane[16] arată că aceste forțe generalizate pot fi, de asemenea, formulate în termeni de raport al derivatelor în timp,

unde vj este viteza punctului de aplicare a forței Fj.
Pentru ca lucrul virtual să fie zero pentru o deplasare virtuală arbitrară, fiecare dintre forțele generalizate trebuie să fie zero, adică

Vezi și
modificareNote explicative
modificare- ^ Some authors e.g. Hand & Finch take the form of the position vector for particle k, as shown here, as the condition for the constraint on that particle to be holonomic.
- ^ Some authors set the constraint equations to a constant for convenience with some constraint equations (e.g. pendulums), others set it to zero. It makes no difference because the constant can be subtracted to give zero on one side of the equation. Also, in Lagrange's equations of the first kind, only the derivatives are needed.
Note
modificare- ^ Ginsberg 2008. , p. 397, §7.2.1 Selection of generalized coordinates
- ^ Farid M. L. Amirouche (). „§2.4: Generalized coordinates”. Fundamentals of multibody dynamics: theory and applications. Springer. p. 46. ISBN 0-8176-4236-6.
- ^ Florian Scheck (). „§5.1 Manifolds of generalized coordinates”. Mechanics: From Newton's Laws to Deterministic Chaos (ed. 5th). Springer. p. 286. ISBN 978-3-642-05369-6.
- ^ Goldstein, Poole & Safko 2002.
- ^ a b Kibble & Berkshire 2004.
- ^ Torby 1984.
- ^ Goldstein, Poole & Safko 2002.
- ^ Hand & Finch 1998.
- ^ Torby 1984.
- ^ Goldstein, Poole & Safko 2002.
- ^ Landau & Lifshitz 1976.
- ^ Greenwood, Donald T. (). Principles of Dynamics (ed. 2nd). Prentice Hall. ISBN 0-13-709981-9.
- ^ Richard Fitzpatrick, Newtonian Dynamics.
- ^ Eric W. Weisstein, Double Pendulum, scienceworld.wolfram.com. 2007
- ^ Torby 1984.
- ^ T. R. Kane and D. A. Levinson, Dynamics: theory and applications, McGraw-Hill, New York, 1985
Bibliografie
modificare- Ginsberg, Jerry H. (). Engineering dynamics (ed. 3rd). Cambridge UK: Cambridge University Press. ISBN 978-0-521-88303-0.
- Goldstein, Herbert; Poole, Charles; Safko, John (). Classical Mechanics (ed. 3rd). San Francisco, CA: Addison Wesley. ISBN 0-201-65702-3.
- Hand, Louis N.; Finch, Janet D. (). Analytical mechanics. Cambridge: Cambridge University Press. ISBN 978-0521575720.
- Kibble, T.W.B; Berkshire, F.H. (). Classical Mechanics (ed. 5th). River Edge NJ: Imperial College Press. ISBN 1860944248.
- Landau, L. D.; Lifshitz, E.M. (). Mechanics (ed. Third). Oxford. ISBN 978-0750628969.
- Torby, Bruce (). „Energy Methods”. Advanced Dynamics for Engineers. HRW Series in Mechanical Engineering. United States of America: CBS College Publishing. ISBN 0-03-063366-4.